python點(diǎn)云地面點(diǎn)濾波(Progressive Morphological Filter)算法介紹(PCL庫(kù))
本篇博客參考Keqi Zhang的文章“A Progressive Morphological Filter for Removing Nonground Measurements From Airborne LIDAR Data”以去除大型建筑、樹(shù)木等常見(jiàn)地物。
不方便的小伙伴可以在此:資源鏈接下載。
1. 引言機(jī)載LiDAR可以獲取快速、低成本地獲取大區(qū)域的高精度地形測(cè)量值。為了獲取高精度DTM/DEM需要區(qū)分測(cè)量點(diǎn)中的地面點(diǎn)(由地面直接返回)及非地面點(diǎn)(建筑、車(chē)、植被)。眾多學(xué)者采用了各種各樣的方法來(lái)進(jìn)行'點(diǎn)云地面點(diǎn)濾波'。(此篇博客中也進(jìn)行了相關(guān)介紹,不再驁述)
2. Morphological Filters(形態(tài)學(xué)濾波) 2.1 膨脹/腐蝕膨脹/腐蝕是其中的兩個(gè)基礎(chǔ)操作,通俗的說(shuō)膨脹/腐蝕可以擴(kuò)大/減小特征的尺寸,并以此組合為開(kāi)/閉操作。針對(duì)LiDAR測(cè)量點(diǎn)p(x, y, z),高程 z 值在(x, y)處對(duì)應(yīng)的膨脹操作可以定義為:
式中:(xp, yp, zp) 代表p點(diǎn)的相鄰點(diǎn),w為操作窗口(可以為一維“線”也可以為二維“矩形/圓/其他形狀等”)。膨脹操作完成后會(huì)輸出p點(diǎn)在窗口w內(nèi)具有最大高程值的近鄰點(diǎn)。與之類似的,腐蝕操作為在p點(diǎn)窗口w內(nèi)找到具有最低高程值的近鄰點(diǎn)。可以通過(guò)下式進(jìn)行定義:
了解膨脹/腐蝕這兩個(gè)基礎(chǔ)操作之后,可以通過(guò)對(duì)其進(jìn)行簡(jiǎn)單組合來(lái)來(lái)形成開(kāi)/閉操作,其中開(kāi)操作為先進(jìn)行腐蝕再進(jìn)行膨脹操作,而閉操作為先膨脹再進(jìn)行腐蝕。在LiDAR數(shù)據(jù)處理中使用了“開(kāi)”操作,處理效果如下圖中所示:
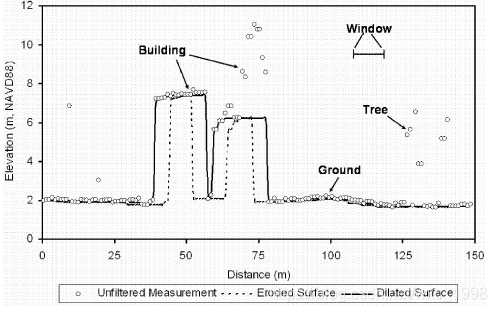
可以從圖中得知:“虛線”是先進(jìn)行“腐蝕”操作所形成的表面,這個(gè)表面剔除了“樹(shù)木”點(diǎn),但是大型建筑物卻變得不完整。“實(shí)線”是對(duì)“腐蝕”操作結(jié)果進(jìn)行“膨脹”操作所形成的表面,可以看出其又恢復(fù)了大型建筑的形狀。基于此,我們可以知道,“開(kāi)操作”具備去除地面上的細(xì)小地物,保留大型地物的能力,這種能力對(duì)于后續(xù)處理是非常重要的。
2.2 形態(tài)學(xué)濾波上述的“開(kāi)操作”只是去除了細(xì)小地物,保留了大型地物,并沒(méi)有去除所有非地面點(diǎn)去除,而且僅僅通過(guò)一個(gè)“開(kāi)操作”也不可能實(shí)現(xiàn)對(duì)復(fù)雜地表的提取。因此,怎么利用好“開(kāi)操作”的能力進(jìn)行下一步驟的提取是進(jìn)一步提升的關(guān)鍵。Kilian等人提出,可以在“開(kāi)操作”處理后的結(jié)果中的每一個(gè)“窗口”內(nèi)找到一個(gè)“最低點(diǎn)”,然后此窗口內(nèi)的其他點(diǎn)若落在“最低點(diǎn)”的一個(gè)高程范圍內(nèi)則認(rèn)為是地面點(diǎn)。這個(gè)高程范圍通常根據(jù)機(jī)載LiDAR系統(tǒng)掃描的精度來(lái)定義,正常為20-30cm。此方法中有兩個(gè)方面對(duì)最后的結(jié)果好壞非常重要:
1.濾波窗口的尺寸,如果窗口尺寸設(shè)置的比較小,則可以很好的保留地面起伏的細(xì)節(jié),但是只能去除像汽車(chē)、樹(shù)木等細(xì)小地物,而對(duì)建筑物則去除效果較差(屋頂通常被認(rèn)為是地面)。相反,若窗口尺寸設(shè)置的較大,則會(huì)過(guò)度去除一些“地面點(diǎn)”,例如,一條道路與一條小水溝相鄰,若窗口尺寸大于道路的寬度,則道路可能就會(huì)被認(rèn)為是非地面點(diǎn)(因?yàn)樾∷疁现械狞c(diǎn)高程較低,會(huì)被認(rèn)為是窗口內(nèi)的最低點(diǎn),而道路點(diǎn)較高,被判斷為非地面點(diǎn))。此外,一些局部的小山丘、沙丘都極可能被“切除”。
2.建筑與樹(shù)木在特定/局部區(qū)域的分布。
注:一個(gè)最理想的情況是我們可以設(shè)置一個(gè)“窗口”,這個(gè)“窗口”的尺寸可以足夠小,能夠保留地面細(xì)節(jié)。同時(shí),還可以足夠大,能夠去除建筑、汽車(chē)、樹(shù)木等地物。但是,這種理想情況在實(shí)際數(shù)據(jù)集中國(guó)并不存在。
為了解決這一問(wèn)題,Kilian等人繼續(xù)提出了可以通過(guò)改變窗口大小來(lái)多次進(jìn)行濾波。每個(gè)點(diǎn)都被賦予一個(gè)與窗口大小相關(guān)的權(quán)重,窗口尺寸越大,點(diǎn)的權(quán)重越高。這種方法雖然得到了更好一些的效果,但是沒(méi)有從'point level'進(jìn)行區(qū)分地面點(diǎn)與非地面點(diǎn)。('point level'區(qū)分的地面點(diǎn)與非地面點(diǎn)之后可以通過(guò)插值的方法使得DEM/DTM的生成效果更好。)
3. Progressive Morphological Filters由上述2.2節(jié)中的分析可知,傳統(tǒng)的形態(tài)學(xué)濾波很難通過(guò)一個(gè)固定大小的窗口去檢測(cè)出各種尺寸變化的不同地物。這一問(wèn)題可以通過(guò)逐漸改變窗口大小來(lái)解決。如下圖中所示,首先使用一個(gè)尺寸為l1的窗口來(lái)對(duì)原始數(shù)據(jù)進(jìn)行開(kāi)操作。由圖中的“虛線”可以看出樹(shù)木等尺寸小于l1的地物被去除,且地形特征中小于l1的部分被“切除”(山丘頂部高程被替換成了l1中的最小值),但是,尺寸大于l1的建筑物被保留了下來(lái)。接著,進(jìn)行下一次迭代,窗口尺寸變?yōu)閘2,對(duì)上一次的處理結(jié)果進(jìn)行開(kāi)操作處理,結(jié)果從“實(shí)線”中可以看出,l2大于建筑的尺寸,所以建筑也被去除,但同時(shí)山丘頂部被“切除”的范圍更大。
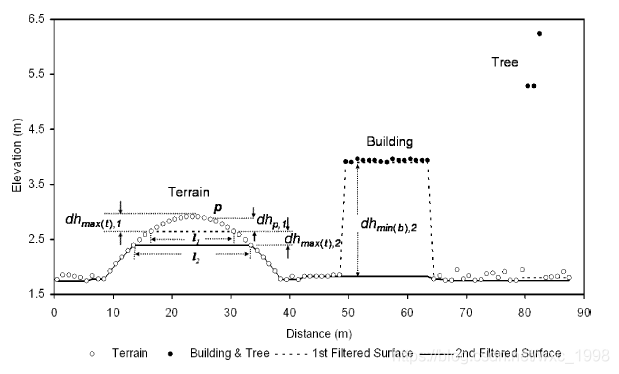
需要注意的是: 通過(guò)逐漸增加窗口尺寸解決了去除不同大小地物的問(wèn)題,但是又引入了'山丘'頂部等小于窗口尺寸的地形特征部分被“切除”的問(wèn)題。
為了解決這一新出現(xiàn)的問(wèn)題,可以通過(guò)引入一個(gè)高度差閾值來(lái)解決。建筑屋頂和地面點(diǎn)之間的高程差是“突變”(abrupt change),而地面高程是“漸變”(gradual change)。因此,二者之間高程變化中的明顯區(qū)別可以幫助我們進(jìn)行區(qū)分。假設(shè)dhp,1代表原始LiDAR測(cè)量值與在任意給定p點(diǎn)處第一次迭代表面之間的高程差,dhT,1代表高程差閾值,則如果dhp,1 ≤ dhT,1點(diǎn)p就被認(rèn)為是地面點(diǎn),反之如果dhp,1 > dhT,1就認(rèn)為點(diǎn)p是一個(gè)非地面點(diǎn)。此后,令dhmax(t),1為當(dāng)前迭代中初始地面點(diǎn)與濾波表面之間差值的最大值,則如果選取的dhT,1 > dhmax(t),1則所有的測(cè)量值都會(huì)保留。在第二次迭代中假設(shè)上一次濾波表面和本次濾波表面的最大高程差為dhmax(t),2,則如果dhmax(t),2 < dhT,2,則高程差值在dhmax(t),2范圍內(nèi)的地面點(diǎn)都會(huì)被保留。類似的,假設(shè)在上次迭代和本次迭代之間建筑高程差值最小為dhmin(b),2(通常近似為建筑的高度),如果dhmin(b),2 > dhT,2,則建筑就會(huì)被移除。通常設(shè)置dhT,k為研究區(qū)域第k次迭代中建筑物的最矮高程值。以dhT,k作為閾值,對(duì)于第k次迭代中的任意點(diǎn)p如果dhp,k < dhT,k則將其標(biāo)記為地面點(diǎn),反之為非地面點(diǎn)。通過(guò)這種方式,不同尺寸的建筑物(樹(shù))可以隨著迭代窗口尺寸的增加逐步被去除。綜上所述,Progressive Morphological Filters的詳細(xì)流程如下圖所示:
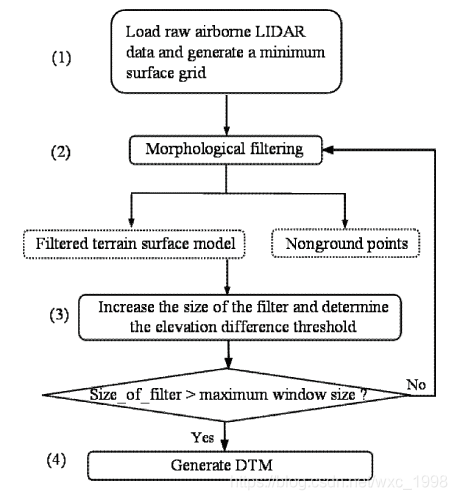
我們可以對(duì)上圖總結(jié)以下四個(gè)步驟:
加載不規(guī)則點(diǎn)云,劃分為規(guī)則網(wǎng)格,在每個(gè)網(wǎng)格中選取高程最低點(diǎn)(如果網(wǎng)格中沒(méi)有點(diǎn)則根據(jù)最近鄰點(diǎn)進(jìn)行插值),構(gòu)建最小高程表面。 使用輸入的初始濾波窗口尺寸、1)中獲取的最小高程表面作為第一次迭代的參數(shù)進(jìn)行第一次迭代。隨后,在后續(xù)的迭代中,以前一次獲取的濾波表面及3)中計(jì)算的濾波窗口尺寸作為輸入。每次迭代的輸出有兩部分:a) 形態(tài)學(xué)濾波后得到的更加光滑的表面;b) 基于不同閾值所檢測(cè)出來(lái)的非地面點(diǎn)。 計(jì)算新的濾波窗口尺寸及不同的高程插值閾值。重復(fù)步驟2)、步驟3)直到窗口尺寸大于預(yù)設(shè)的最大窗口。 基于去除非地面測(cè)量值的數(shù)據(jù)進(jìn)行生成DEM/DTM。注意:每一次迭代中的“開(kāi)操作”實(shí)際都是作用在步驟1)所劃分網(wǎng)格中的點(diǎn),所以Progressive MorphologicalFilters是'point level'來(lái)對(duì)LiDAR測(cè)量值進(jìn)行濾波處理的。
3.1 參數(shù)計(jì)算(窗口尺寸/高程差閾值)在上述步驟3)中我們要變化窗口尺寸 wk和高程差閾值 dhT,k兩個(gè)參數(shù)的值,以進(jìn)行下一次迭代,那么這兩個(gè)值是怎么計(jì)算的呢?
3.1.1 窗口尺寸首先是窗口尺寸 wk有兩種計(jì)算方式,第一種是:
式中,k為迭代次數(shù),b是初始窗口大小(由用戶進(jìn)行輸入),最后+1是為了保證 wk為一個(gè)奇數(shù),窗口對(duì)稱。但是,如果一個(gè)研究區(qū)域具有非常大的地物,這種增加窗口尺寸速度太慢則會(huì)耗費(fèi)較多時(shí)間。因此,可以使用第二種方式,通過(guò)指數(shù)增長(zhǎng)來(lái)改變窗口大小,計(jì)算如下式:
同樣的,式中k為迭代次數(shù),b是初始窗口大小(由用戶進(jìn)行輸入),這種方式的增長(zhǎng)速度較第一種方式快很多。
3.1.2 高程差閾值高程差閾值與研究區(qū)域的地形坡度密不可分,因此可以通過(guò)下式進(jìn)行計(jì)算:

式中,dh0為初始高程差閾值,s為坡度,c為格網(wǎng)大小,dhmax為最大高程差閾值。
在城市區(qū)域,樹(shù)木、汽車(chē)相對(duì)于建筑的尺寸小很多,所以通常是最后濾除建筑,最大高程差閾值dhmax可以設(shè)置為一個(gè)固定值(如最矮建筑物高度)。而在山區(qū),主要的非地面點(diǎn)為植被,所以并沒(méi)有必要設(shè)置固定的最大高程差閾值dhmax,于是dhmax通常被設(shè)置為測(cè)區(qū)內(nèi)的最大高程差。
此外,坡度s通過(guò)第k次迭代的最大高程差dhmax(t),k,以及窗口尺寸wk進(jìn)行計(jì)算,如下式所示:
#include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/filters/extract_indices.h>#include <pcl/segmentation/progressive_morphological_filter.h>intmain (int argc, char** argv){ pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>); pcl::PointIndicesPtr ground (new pcl::PointIndices); // Fill in the cloud data pcl::PCDReader reader; // Replace the path below with the path where you saved your file reader.read<pcl::PointXYZ> ('samp11-utm.pcd', *cloud); std::cerr << 'Cloud before filtering: ' << std::endl; std::cerr << *cloud << std::endl; // Create the filtering object pcl::ProgressiveMorphologicalFilter<pcl::PointXYZ> pmf; pmf.setInputCloud (cloud); pmf.setMaxWindowSize (20); pmf.setSlope (1.0f); pmf.setInitialDistance (0.5f); pmf.setMaxDistance (3.0f); pmf.extract (ground->indices); // Create the filtering object pcl::ExtractIndices<pcl::PointXYZ> extract; extract.setInputCloud (cloud); extract.setIndices (ground); extract.filter (*cloud_filtered); std::cerr << 'Ground cloud after filtering: ' << std::endl; std::cerr << *cloud_filtered << std::endl; pcl::PCDWriter writer; writer.write<pcl::PointXYZ> ('samp11-utm_ground.pcd', *cloud_filtered, false); // Extract non-ground returns extract.setNegative (true); extract.filter (*cloud_filtered); std::cerr << 'Object cloud after filtering: ' << std::endl; std::cerr << *cloud_filtered << std::endl; writer.write<pcl::PointXYZ> ('samp11-utm_object.pcd', *cloud_filtered, false); return (0);}
到此這篇關(guān)于python點(diǎn)云地面點(diǎn)濾波(Progressive Morphological Filter)算法介紹(PCL庫(kù))的文章就介紹到這了,更多相關(guān)python點(diǎn)云地面點(diǎn)濾波PCL庫(kù)內(nèi)容請(qǐng)搜索好吧啦網(wǎng)以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持好吧啦網(wǎng)!
相關(guān)文章:
1. CSS3實(shí)例分享之多重背景的實(shí)現(xiàn)(Multiple backgrounds)2. XML入門(mén)的常見(jiàn)問(wèn)題(四)3. vue實(shí)現(xiàn)復(fù)制文字復(fù)制圖片實(shí)例詳解4. XML基本概念XPath、XSLT與XQuery函數(shù)介紹5. 前端html+css實(shí)現(xiàn)動(dòng)態(tài)生日快樂(lè)代碼6. 關(guān)于html嵌入xml數(shù)據(jù)島如何穿過(guò)樹(shù)形結(jié)構(gòu)關(guān)系的問(wèn)題7. WML的簡(jiǎn)單例子及編輯、測(cè)試方法第1/2頁(yè)8. 不要在HTML中濫用div9. el-input無(wú)法輸入的問(wèn)題和表單驗(yàn)證失敗問(wèn)題解決10. XML入門(mén)的常見(jiàn)問(wèn)題(三)

 網(wǎng)公網(wǎng)安備
網(wǎng)公網(wǎng)安備